Козловой кран
Мостовой кран
Краны европейского типа
Консольный кран
Подъёмный электромагнит
Грейферы
Тельферы/тали
Электрические тележки
Лебёдки

Козловой Кран с электрическими талями MH

Козловой Кранс электрическими талямиL

Козловой Кранс лебедкой 50-100т

Полукозловой Кран типа BMH

Козловой двухбалочный кран с талями типа А

Козловой двухбалочный кран типа RMG на рельсах

Однобалочный Мостовой Кран LDA

Мостовой Кран с Взрывозащищенной электрическойбалкой LB

Однобалочный Мостовой кранс Грейферами типа LDZ

Мостовой кранс электромагнитом типа QC

Мостовой кранс электрическими талями типа LH

Мостовый Двухбалочный Кран типа QD

Мостовый Двухбалочный Кран европейского типа

Козловой двухбалочный кран европейского типа

Козловой Однобалочный кран европейского типа

Мостовый Однобалочный кран европейского типа

Консольный Кран европейского типа



Круглый грузоподъемный электромагнит для металлолома MW5

Прямоугольные Электромагниты для перегрузки заготовок из листовой стали и слябов MW22

Электромагниты для пачек и бунтов арматуры и фасонных сталей MW38

Электромагниты для слябов и блюмов

Электромагниты для проволок в пачках(катанок) MW19

Гидравлические магниты

Четырехканатные грейферы

Экскаватор-грейфер

Гидравлический Многочелюстной грейфер

Одноканатные грейферы

Канатная таль двухбалочного европейского типа

Взрывозащищенная таль европейского типа

Элеткрическая канатная таль европейского типа

Элеткрическая цепная таль европейского типа

Металлургические электрические тали

Взрывозащищенная электрическая таль типа HB







Грузоподъемные траверсы
Клещевые захваты
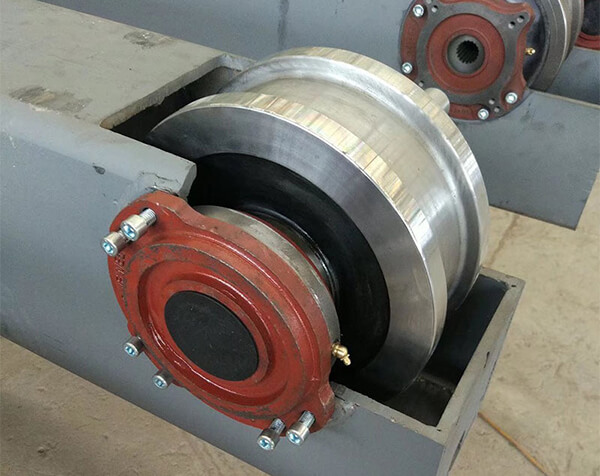
Крановые колеса
Кабельные барабаны
Муфта кранов
Радиоуправление
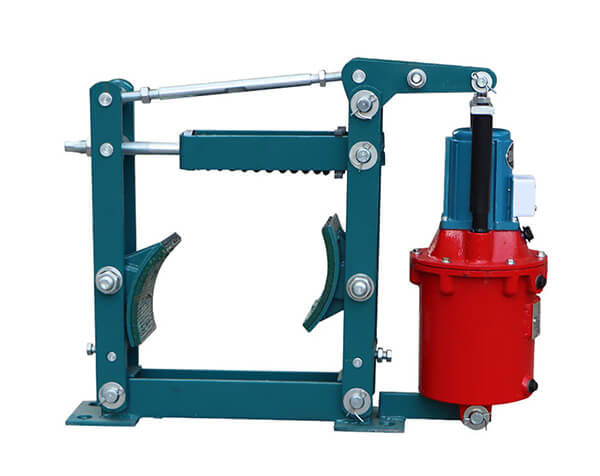
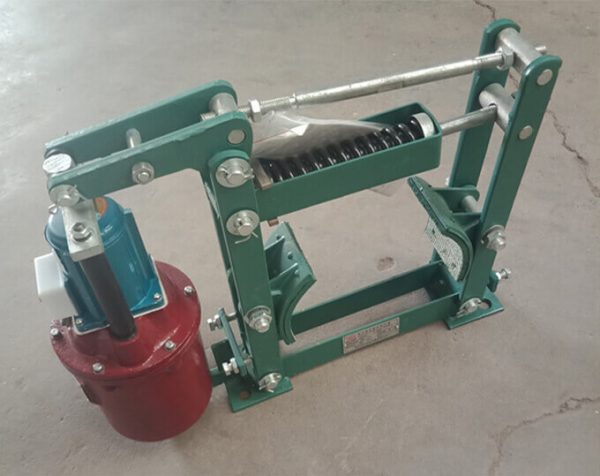
Тормоза
Концевая балка
Кабели

Захват для рулонной стали

Крюк Крана

Линейные траверсы

Разбрасыватель контейнеров

Траверса для контейнеров

Клещевые захваты для листового металла

Клещевой захват для слябов и блюмов

Электрический клещевой захват для подъема рулонов